



















Japan’s ShinMaywa is conducting tests for a future unmanned amphibian that could play a role in oceanic research work.
The company recently conducted a test flight with its XU-M II unmanned aircraft, which is 1/5 the scale of a proposed unmanned amphibian.

“The ultimate goal of the XU-M program is to create ShinMaywa’s new flying boat products, whether manned or unmanned,” says the company.
“To achieve this goal, we are utilizing multiple aircraft to conduct research and integration attempts on new flying boat configurations, external sensing technologies, control technologies, and payload deployment technologies.”
ShinMaywa produces the world’s second largest amphibian, the US-2, which is in service as a long-range search and rescue aircraft with the Japan Maritime Self-Defense Force.
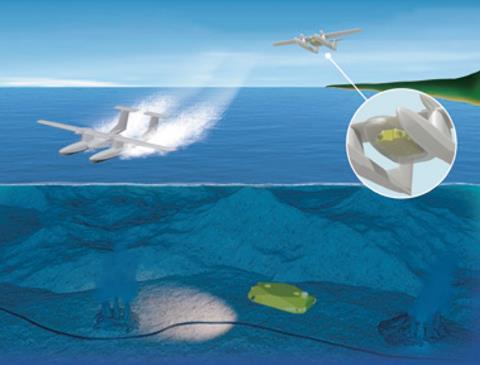
Following a 2024 contract, the company is also part of the Japanese government’s KAIKU (Sea-Air) programme, which envisages deploying an autonomous underwater vehicle (AUV) from an unmanned amphibious aircraft.
A KAIKU brochure depicts the aircraft as having twin hulls, between which the AUV is located, along with a launch and recovery system.
The company says that deploying a AUV from an unmanned aircraft allows underwater surveys to commence far sooner, as the traditional survey method involves the dispatch of a manned surface ship to a location at sea.
In the water, the AUV can perform a range of survey work, such as assessing marine life and mapping the seafloor.
The company notes that Japan’s exclusive economic zone extends 200nm (370km) from the country’s coastline and covers an area exceeding that of Europe. Using ships and submarines to survey this vast area is inefficient.
“The personnel, costs, and time required during this period are highly inefficient, exposing Japan to risks from an energy, resource, environmental, and economic perspective,” says the company.
“From this perspective, a solution is needed that simultaneously enables the rapid transport and deployment of submarines and underwater vehicles, communication for data transfer during exploration, and the secure recovery of submarines and underwater vehicles.”





